
Pernahkah kamu membayangkan dunia tanpa matematika? Sulit bukan? Apalagi di era teknologi yang semakin canggih seperti sekarang, matematika hadir sebagai pondasi tak terpisahkan dalam berbagai bidang, salah satunya dalam perkembangan dunia robotika. Bidang yang dulu hanya ada dalam film fiksi ilmiah, kini semakin nyata dan mengubah cara hidup manusia.
Artikel ini akan mengajak kamu menyelami lebih dalam bagaimana matematika berperan sebagai kunci utama di balik kecanggihan robot. Mulai dari algoritma dasar pergerakan hingga kemampuan kompleks seperti navigasi dan pengambilan keputusan, mari kita ungkap bersama rahasia di balik layar dunia robotika yang penuh inovasi!
Pengantar Robotika dan Penerapannya

Robotika adalah bidang ilmu pengetahuan dan teknologi yang berfokus pada desain, konstruksi, operasi, dan aplikasi robot. Robot adalah mesin yang dapat diprogram untuk melakukan tugas-tugas tertentu, baik yang sederhana maupun kompleks, secara otomatis.
Sejarah robotika dapat ditelusuri kembali ke zaman kuno, dengan munculnya automata mekanik yang dirancang untuk menghibur atau membantu tugas-tugas sederhana. Namun, robotika modern mulai berkembang pesat pada abad ke-20, didorong oleh kemajuan dalam bidang elektronika, komputer, dan ilmu material.
Penerapan Robotika
Saat ini, robotika memiliki peran penting dalam berbagai aspek kehidupan manusia. Beberapa penerapan robotika yang umum meliputi:
- Industri Manufaktur: Robot digunakan dalam jalur perakitan untuk melakukan tugas-tugas berulang, seperti pengelasan, pengecatan, dan perakitan.
- Kesehatan: Robot bedah membantu ahli bedah melakukan prosedur kompleks dengan presisi tinggi, sementara robot rehabilitasi membantu pasien dalam proses pemulihan.
- Eksplorasi: Robot penjelajah digunakan untuk menjelajahi lingkungan yang berbahaya atau tidak ramah bagi manusia, seperti planet lain atau dasar laut.
- Pertanian: Robot pertanian membantu mengotomatiskan tugas-tugas seperti panen, penyemprotan, dan pemantauan tanaman.
- Kehidupan Sehari-hari: Robot penyedot debu dan asisten rumah tangga cerdas semakin populer, membantu meringankan beban pekerjaan rumah tangga.
Keuntungan dan Tantangan Robotika
Keuntungan utama penggunaan robot meliputi peningkatan efisiensi, produktivitas, dan keselamatan. Robot dapat bekerja lebih cepat, lebih akurat, dan lebih lama daripada manusia, dan mereka tidak rentan terhadap kelelahan atau kesalahan manusia.
Namun, robotika juga menghadapi tantangan, seperti biaya implementasi yang tinggi, potensi penggantian pekerjaan manusia, dan isu-isu etika terkait dengan kecerdasan buatan dan otonomi robot.
Masa Depan Robotika
Masa depan robotika penuh dengan potensi. Kemajuan dalam kecerdasan buatan, pembelajaran mesin, dan robotika lunak diharapkan akan menghasilkan robot yang lebih cerdas, adaptif, dan mampu berinteraksi dengan manusia dan lingkungannya dengan cara yang lebih alami.
Robotika memiliki potensi untuk merevolusi banyak aspek kehidupan manusia, membawa manfaat besar bagi masyarakat. Namun, penting untuk mempertimbangkan dengan cermat implikasi etika dan sosial dari teknologi ini seiring dengan perkembangannya.
Konsep Matematika Esensial dalam Robotika
Robotika adalah bidang yang mengasyikkan dan berkembang pesat yang menggabungkan sains dan teknik untuk menciptakan mesin yang dapat melakukan tugas secara mandiri. Untuk memahami robotika secara mendalam, pemahaman yang kuat tentang konsep matematika tertentu sangatlah penting. Konsep-konsep ini membentuk dasar untuk memodelkan, menganalisis, dan mengendalikan robot.
Salah satu konsep dasar adalah aljabar linear, yang menyediakan kerangka kerja untuk merepresentasikan posisi, orientasi, dan gerakan robot menggunakan vektor, matriks, dan transformasi. Melalui aljabar linear, kita dapat menggambarkan hubungan spasial antara berbagai komponen robot dan menghitung gerakan mereka.
Kalkulus juga memainkan peran yang krusial, memungkinkan kita untuk mempelajari gerakan robot dari waktu ke waktu. Konsep seperti turunan dan integral membantu kita menganalisis kecepatan, percepatan, dan lintasan robot. Pemahaman tentang kalkulus sangat penting untuk mendesain algoritma kontrol yang memastikan robot dapat bergerak dengan akurat dan efisien.
Selanjutnya, geometri sangat penting dalam robotika, khususnya untuk perencanaan jalur dan penghindaran rintangan. Dengan menggunakan prinsip-prinsip geometri, kita dapat memodelkan lingkungan tempat robot beroperasi dan menentukan jalur yang optimal untuk mencapai tujuannya sambil menghindari tabrakan. Geometri komputasi, subbidang geometri, menyediakan algoritma dan struktur data yang efisien untuk memecahkan masalah terkait perencanaan jalur dan lokalisasi.
Selain konsep inti ini, probabilitas dan statistik sangat penting dalam robotika, terutama dalam konteks persepsi dan pengambilan keputusan robot. Sensor robot seringkali memberikan data yang berisik dan tidak lengkap, dan teknik probabilistik membantu kita untuk memodelkan ketidakpastian ini dan membuat estimasi yang kuat tentang keadaan robot dan lingkungannya. Statistik memungkinkan kita untuk menganalisis data sensor, mengidentifikasi pola, dan membuat prediksi, yang mengarah pada algoritma robotika yang lebih cerdas dan adaptif.
Kesimpulannya, matematika membentuk dasar dari robotika, menyediakan alat dan teknik yang diperlukan untuk memahami, mendesain, dan mengendalikan robot. Menguasai aljabar linear, kalkulus, geometri, probabilitas, dan statistik membekali calon ahli robot dengan dasar yang kuat untuk mengatasi tantangan di bidang yang menarik ini.
Aljabar Linear: Fondasi Pergerakan Robot
Di balik gerakan robot yang presisi dan kompleks, tersembunyi kekuatan matematika yang tak terbantahkan, yaitu aljabar linear. Cabang matematika ini menyediakan kerangka kerja penting untuk merepresentasikan dan memanipulasi posisi, orientasi, dan gerakan robot di dalam ruang. Artikel ini akan mengupas bagaimana aljabar linear menjadi fondasi pergerakan robot.
1. Representasi Posisi dan Orientasi
Robot, dalam bentuknya yang paling sederhana, dapat dibayangkan sebagai titik atau objek kaku yang bergerak dalam ruang tiga dimensi. Aljabar linear memungkinkan kita untuk merepresentasikan posisi robot dengan vektor dan orientasinya dengan matriks rotasi. Vektor menggambarkan perpindahan dari titik acuan ke posisi robot, sementara matriks rotasi menggambarkan putaran robot terhadap sumbu-sumbu koordinat.
2. Menjelaskan Gerakan Robot
Sebuah robot tidak hanya diam di satu titik, ia bergerak! Pergerakan ini, baik itu translasi (perpindahan) maupun rotasi, dapat direpresentasikan dengan operasi aljabar linear. Penjumlahan vektor digunakan untuk menggabungkan pergerakan translasi, sedangkan perkalian matriks digunakan untuk menggabungkan pergerakan rotasi dan translasi secara bersamaan. Representasi matematis ini memungkinkan kita untuk menghitung dan memprediksi posisi dan orientasi robot setelah serangkaian gerakan kompleks.
3. Kinematika Robot
Aljabar linear merupakan kunci dalam memahami kinematika robot, yaitu studi tentang gerakan robot tanpa memperhatikan gaya yang menyebabkan gerakan tersebut. Dengan menggunakan matriks transformasi homogen, yang merupakan kombinasi dari matriks rotasi dan vektor translasi, kita dapat memodelkan hubungan antara konfigurasi sendi robot dengan posisi dan orientasi ujung robot (end-effector). Informasi ini sangat penting dalam perencanaan jalur dan kontrol gerakan robot.
4. Aplikasi dalam Robotika Modern
Konsep-konsep aljabar linear ini diaplikasikan secara luas dalam berbagai aspek robotika modern, mulai dari robotika industri hingga robotika medis dan robot otonom. Contohnya, pada robot manipulator yang digunakan di pabrik-pabrik, aljabar linear membantu menghitung gerakan yang tepat untuk mengambil dan menempatkan objek dengan akurat. Pada robot bedah, aljabar linear membantu memandu instrumen bedah dengan presisi tinggi di dalam tubuh pasien. Sementara itu, pada mobil self-driving, aljabar linear membantu dalam pemetaan lingkungan, lokalisasi, dan perencanaan jalur.
5. Kesimpulan
Aljabar linear menyediakan bahasa matematika yang kuat untuk memahami dan mengendalikan pergerakan robot. Konsep-konsep seperti vektor, matriks, dan transformasi linear menjadi dasar bagi berbagai algoritma dan teknik yang digunakan dalam robotika modern. Seiring dengan perkembangan teknologi robotika yang semakin pesat, pemahaman yang baik tentang aljabar linear akan menjadi semakin penting bagi para engineer dan ilmuwan yang ingin mengembangkan robot yang lebih canggih dan bermanfaat bagi kehidupan manusia.
Kalkulus: Menguasai Dinamika dan Kontrol Robot
Di era modern yang serba canggih ini, robotika telah muncul sebagai bidang yang sangat menarik dan berkembang pesat. Dari manufaktur dan perawatan kesehatan hingga eksplorasi ruang angkasa dan hiburan, robot memainkan peran yang semakin penting dalam kehidupan kita. Di balik gerakan dan kemampuan robot yang mengesankan terdapat dasar matematika yang kuat, terutama kalkulus.
Kalkulus, cabang matematika yang berurusan dengan perubahan dan gerak, menyediakan alat penting untuk memahami dan mengendalikan perilaku robot. Dengan menerapkan prinsip-prin kalkulus, para insinyur dan ilmuwan dapat memodelkan dinamika robot, mendesain algoritma kontrol yang canggih, dan mengoptimalkan kinerjanya.
Kinematika Robot: Di Mana dan Ke Mana Perginya
Kinematika adalah studi tentang gerak tanpa memperhatikan gaya yang menyebabkannya. Dalam robotika, kinematika berkaitan dengan posisi, kecepatan, dan percepatan robot dan bagian-bagiannya. Kalkulus, khususnya diferensial dan integral, memainkan peran penting dalam kinematika robot.
Misalnya, untuk menentukan kecepatan dan percepatan suatu sambungan robot, kita dapat menggunakan turunan. Dengan menghitung turunan dari posisi sambungan terhadap waktu, kita dapat memperoleh informasi tentang seberapa cepat sambungan tersebut bergerak. Demikian pula, dengan mengintegrasikan kecepatan sambungan terhadap waktu, kita dapat menentukan perpindahannya.
Dinamika Robot: Hukum Newton Beraksi
Dinamika, di sisi lain, mempertimbangkan gaya dan torsi yang bekerja pada robot dan bagaimana pengaruhnya terhadap gerakan. Untuk menganalisis dinamika robot, kita mengandalkan hukum gerak Newton, yang menghubungkan gaya, massa, dan percepatan.
Persamaan diferensial, konsep fundamental dalam kalkulus, sangat penting dalam memodelkan dinamika robot. Dengan menetapkan persamaan diferensial yang menggambarkan hubungan antara gaya yang bekerja pada robot, massa, dan percepatannya, kita dapat mensimulasikan perilaku robot dan memprediksi gerakannya.
Kontrol Robot: Menjaga Robot Tetap Terkendali
Kontrol robot berkaitan dengan mendesain algoritma yang memungkinkan robot untuk melakukan tugas yang diinginkan secara akurat dan efisien. Kalkulus, khususnya konsep umpan balik dan kontrol optimal, memainkan peran penting dalam sistem kontrol robot.
Umpan balik memungkinkan robot untuk merasakan lingkungannya dan menyesuaikan gerakannya sesuai kebutuhan. Dengan terus memantau posisi, kecepatan, atau variabel lain yang relevan dan membandingkannya dengan nilai yang diinginkan, pengontrol umpan balik dapat menghasilkan sinyal kontrol korektif untuk meminimalkan kesalahan dan menjaga robot tetap pada jalurnya.
Kontrol optimal bertujuan untuk menemukan sinyal kontrol terbaik yang mengoptimalkan kinerja robot terhadap kriteria tertentu. Teknik kontrol optimal seringkali melibatkan kalkulus variasi, cabang kalkulus yang berurusan dengan menemukan fungsi yang meminimalkan atau memaksimalkan fungsional tertentu.
Kesimpulan: Membuka Potensi Robot dengan Kalkulus
Kalkulus adalah dasar yang sangat diperlukan untuk memahami dan mengendalikan perilaku robot. Dari kinematika hingga dinamika dan kontrol, prinsip-prinsip kalkulus memungkinkan para insinyur dan ilmuwan untuk memodelkan, menganalisis, dan mendesain sistem robot yang canggih.
Seiring dengan kemajuan teknologi robot, pentingnya kalkulus dalam robotika hanya akan meningkat. Dengan menguasai alat dan teknik kalkulus, generasi mendatang dari insinyur dan ilmuwan robot dapat terus mendorong batas-batas dari apa yang mungkin dilakukan, mengarah ke robot yang lebih cerdas, lebih mampu, dan lebih serbaguna.
Probabilitas dan Statistik: Membangun Kemampuan Pengambilan Keputusan Robot

Di era digital yang semakin canggih, robot tidak lagi hanya menjadi fiksi ilmiah, tetapi telah menjelma menjadi realitas yang berperan penting dalam berbagai aspek kehidupan. Dari industri manufaktur hingga layanan kesehatan, robot secara bertahap mengambil alih tugas-tugas yang dulunya hanya dapat dilakukan oleh manusia. Kemampuan robot untuk memproses informasi dan mengambil keputusan secara mandiri menjadi kunci utama dalam evolusi ini, dan di sinilah peran penting probabilitas dan statistik.
Pada dasarnya, probabilitas dan statistik adalah dua sisi mata uang yang sama dalam membantu robot untuk “berpikir” dan bertindak secara cerdas. Probabilitas memungkinkan robot untuk menangani ketidakpastian, sesuatu yang sangat umum dalam dunia nyata. Bayangkan sebuah robot yang bertugas membersihkan rumah. Robot tersebut harus dapat memperkirakan probabilitas keberadaan rintangan di depannya, seperti mainan yang berserakan atau hewan peliharaan yang berlarian. Dengan memahami probabilitas, robot dapat merencanakan jalur navigasi yang optimal dan menghindari tabrakan.
Di sisi lain, statistik membantu robot untuk “belajar” dari data dan pengalaman. Setiap interaksi robot dengan lingkungannya, seperti data sensor yang ditangkap atau hasil dari suatu tindakan, merupakan sumber informasi berharga. Melalui penerapan algoritma statistik, robot dapat mengidentifikasi pola-pola tersembunyi dalam data tersebut. Sebagai contoh, robot yang bekerja di lini produksi dapat menggunakan statistik untuk menganalisis data kualitas produk dan mendeteksi adanya anomali atau cacat produksi.
Ketika digabungkan, probabilitas dan statistik memberikan fondasi yang kuat bagi robot untuk mengembangkan kemampuan pengambilan keputusan. Robot tidak lagi hanya mengikuti instruksi yang diprogram secara statis, tetapi dapat beradaptasi dengan situasi yang dinamis dan mengambil keputusan yang optimal berdasarkan informasi yang tersedia. Dalam konteks yang lebih luas, hal ini membuka jalan bagi terciptanya robot yang lebih otonom, fleksibel, dan mampu berkolaborasi secara efektif dengan manusia.
Tentu saja, perjalanan untuk menciptakan robot yang benar-benar cerdas masih panjang. Namun, dengan terus mengembangkan dan mengintegrasikan konsep-konsep probabilitas dan statistik, kita semakin mendekati era di mana robot dapat menjadi mitra yang berharga dalam memecahkan berbagai tantangan kompleks yang dihadapi manusia.
Geometri: Memetakan Dunia dan Navigasi Robot
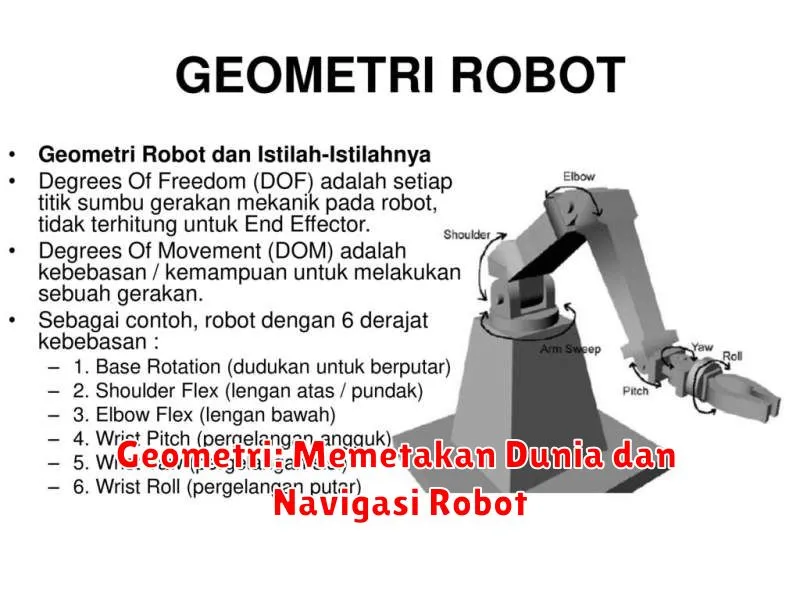
Geometri, studi tentang bentuk, ukuran, posisi, dan properti ruang, memainkan peran penting dalam banyak aspek kehidupan kita, mulai dari membangun rumah hingga menavigasi dunia di sekitar kita. Salah satu aplikasi geometri yang paling menarik adalah di bidang robotika, di mana ia digunakan untuk memungkinkan robot “melihat” dan menavigasi lingkungan mereka secara efektif.
Pemetaan lingkungan adalah langkah penting dalam navigasi robot. Robot menggunakan berbagai sensor, seperti kamera, LiDAR, dan sonar, untuk mengumpulkan data tentang lingkungan mereka. Data ini kemudian digunakan untuk membuat peta, atau representasi geometris, dari dunia di sekitar mereka. Peta ini mungkin termasuk informasi tentang lokasi rintangan, bentuk objek, dan bahkan tekstur permukaan.
Lokalitas adalah kemampuan robot untuk mengetahui posisinya di dalam peta. Ini dicapai dengan menggunakan algoritma SLAM (Simultaneous Localization and Mapping), yang memungkinkan robot memperbarui pemahamannya tentang lingkungannya dan posisinya sendiri secara bersamaan. Dengan kata lain, robot membangun peta saat bergerak, dan menggunakan peta tersebut untuk menentukan lokasinya sendiri.
Setelah robot memiliki peta dan mengetahui posisinya, ia dapat menggunakan algoritma perencanaan jalur untuk menemukan jalur yang aman dan efisien menuju tujuan. Algoritma ini mempertimbangkan bentuk geometris lingkungan, serta kendala seperti rintangan dan area terlarang.
Aplikasi geometri dalam robotika sangat luas dan beragam. Dari robot vakum yang membersihkan rumah kita hingga mobil self-driving yang menavigasi jalan raya yang padat, geometri memungkinkan robot untuk berinteraksi dengan dunia fisik dengan cara yang cerdas dan efisien. Seiring dengan kemajuan teknologi, kita dapat mengharapkan untuk melihat aplikasi geometri yang lebih inovatif dalam robotika di masa depan.



{kind=link}